Project overview
Course: ME490 Product Design · Role: Designer & builder · Tools: SolidWorks, Illustrator, Arduino, laser cutter, 3D printers · Date: Fall 2025 (1 week)
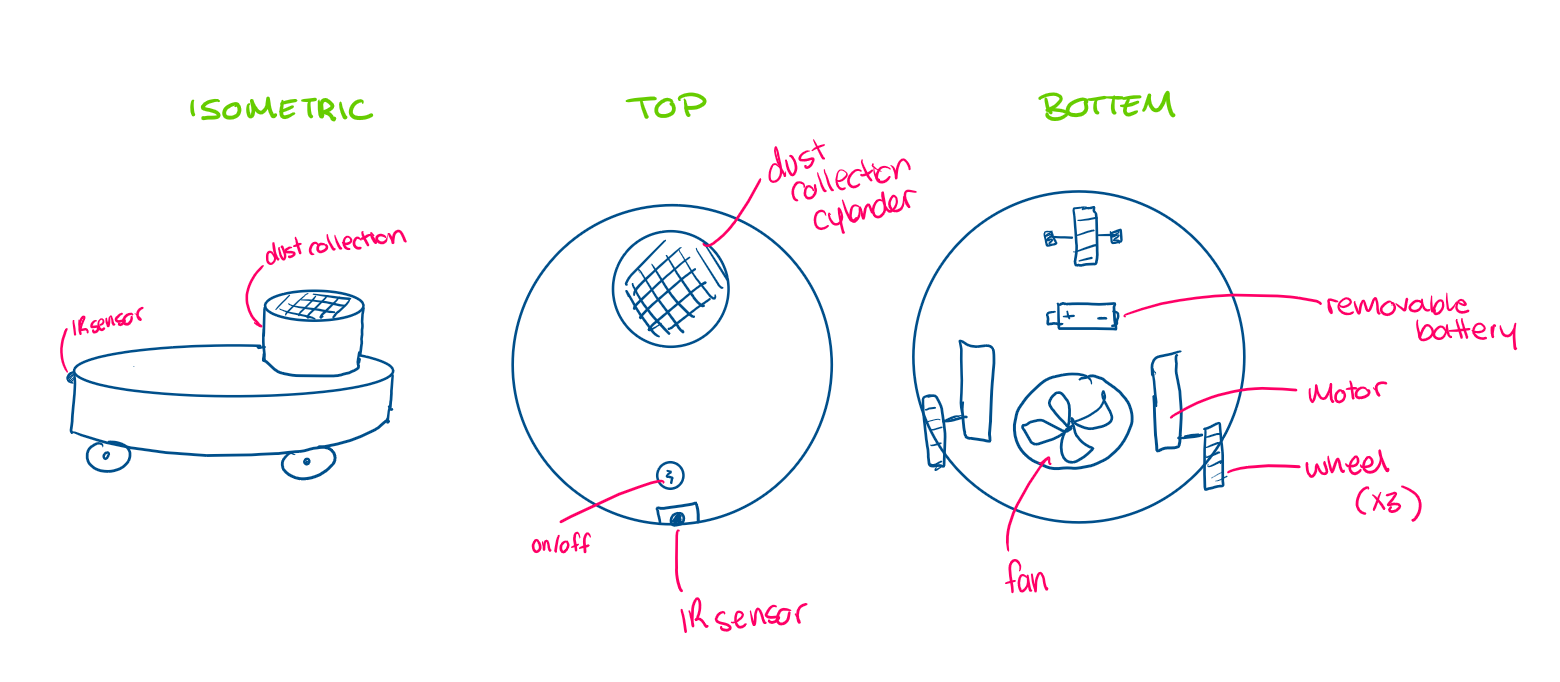
Vroom-mate is a compact remote-controlled vacuum built in one week from found parts and rapid-prototyping tools. This small, low-profile remote vacuum reduces the awkward, time-consuming crawling necessary when trying to clean a dorm room with a handheld vacuum.
Key Components
-
Design inspiration & brief
Start with a simple dorm problem and scope down to a minimal, remote-controlled vacuum you can build in a week.
-
Mechanical base & shell
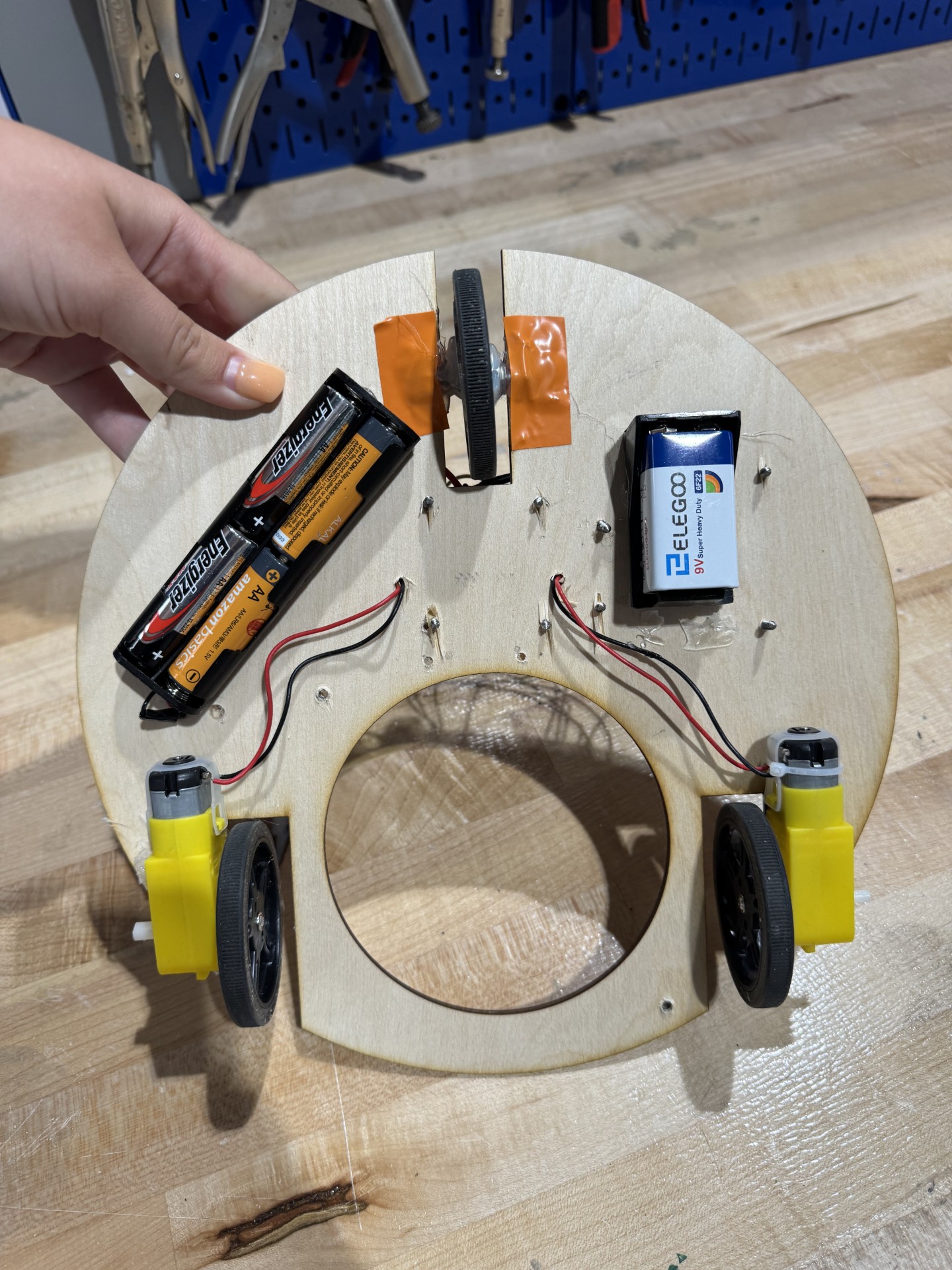
Laser-cut wooden base sized for a 1 ft diameter robot and a 6 in fan hole; 3D-printed lid and dust cylinder printed in multiple parts to fit printers.
-
Electronics & control
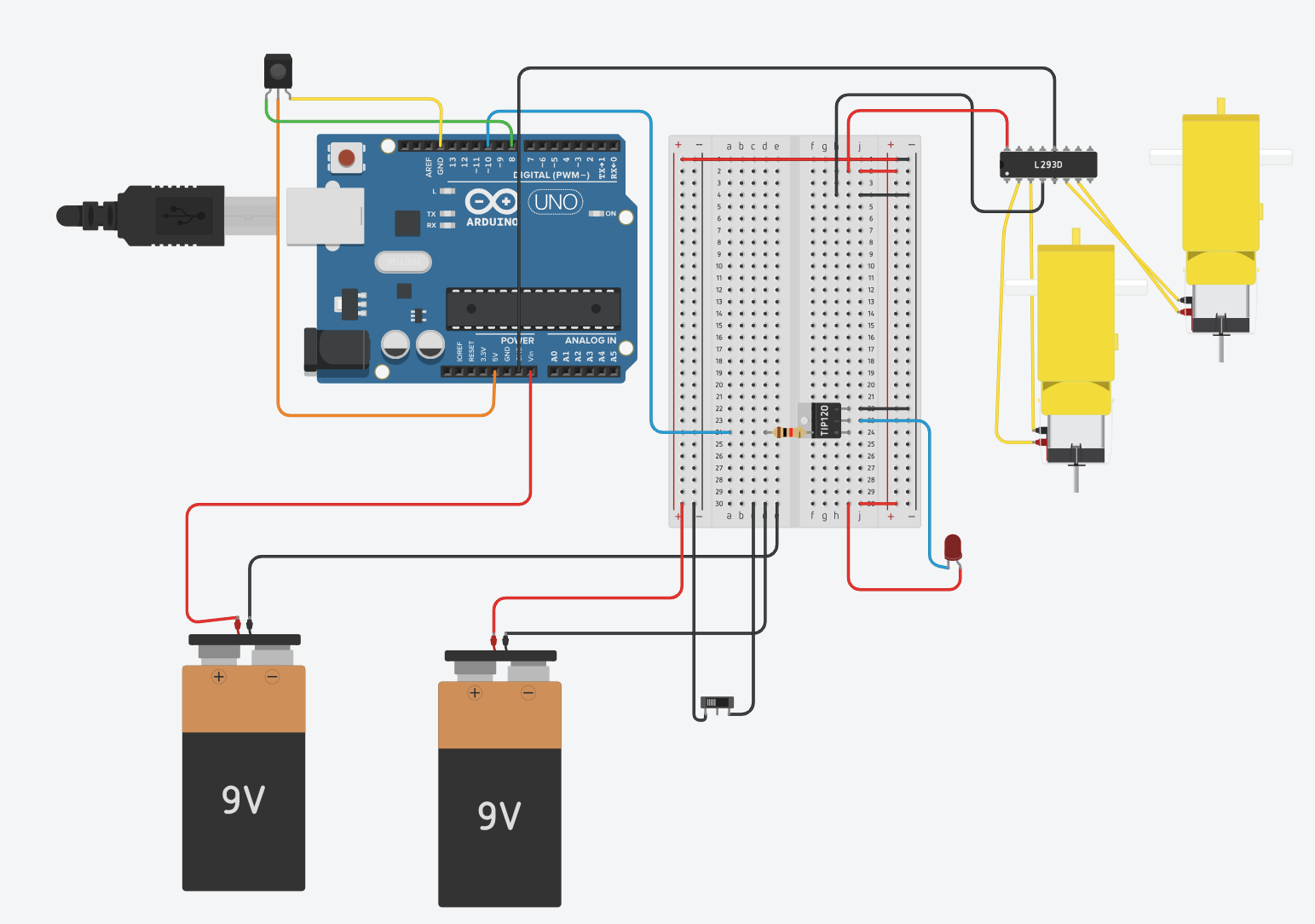
Arduino + IR receiver, motor driver for two drive motors, manual fan power switch and separate power supply for fan and motors.
-
Collection & airflow
Fan-driven suction that lifts lightweight debris into a 3D-printed cylinder lined with breathable fabric to trap particles.
Play-by-play: week-long build (detailed)
Click a card to view photos and read the full step description.
Project reflection
What worked, what didn't, and the skills gained
This week-long prototype taught me a lot — especially about rapid iteration under material and time constraints.
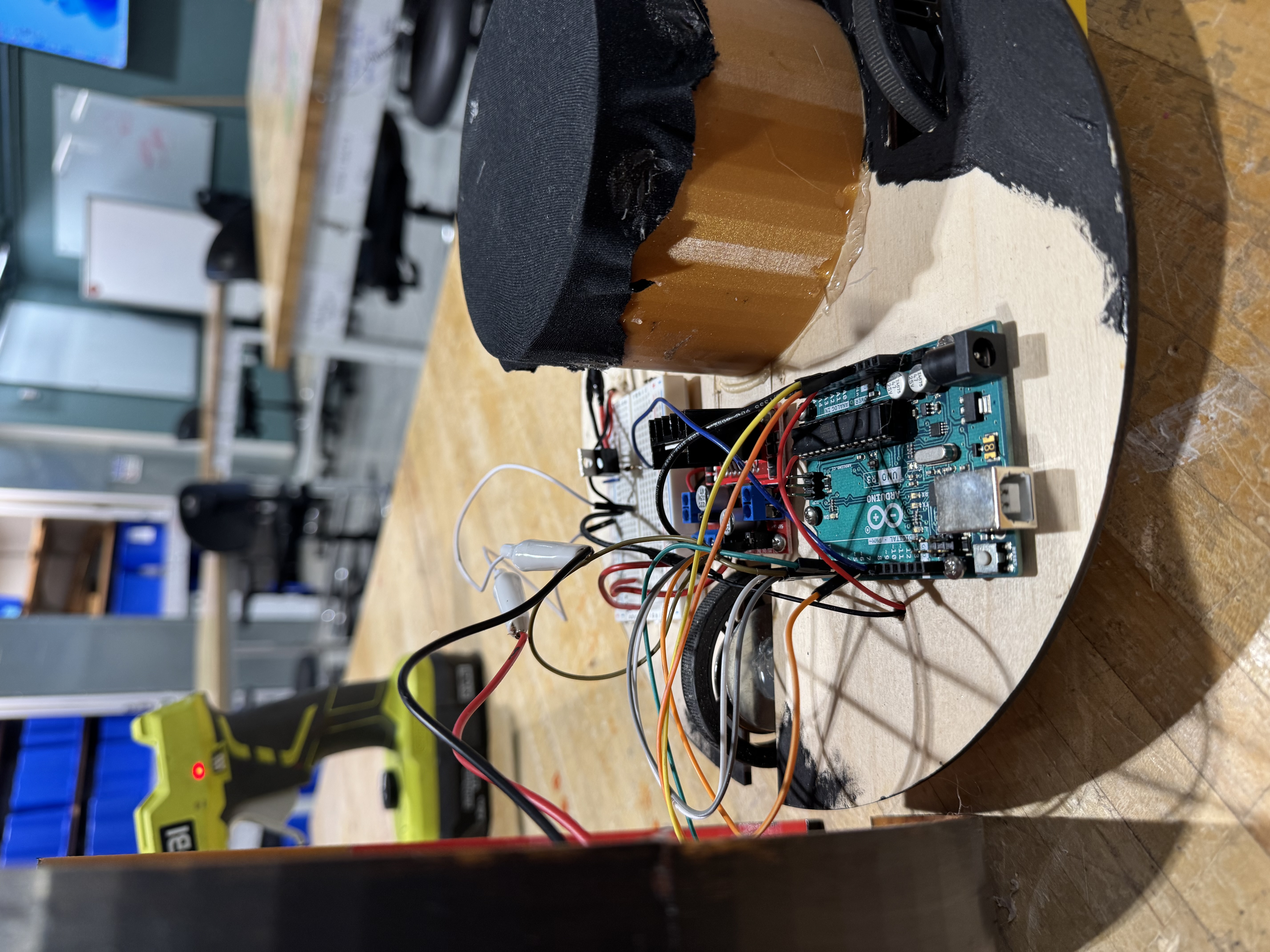
The build process was fast and a bit messy by necessity: I used a solderless breadboard for quick wiring, laser-cut scrap wood for the base, and multi-part 3D prints for the lid and dust cylinder so everything could be finished within a few days.
Performance-wise the vacuum was limited: it reliably picked up very light debris like miniature pom-poms and small yarn fragments, but struggled with anything larger than a mini pom-pom. The fan and airflow design could not generate enough suction for heavier debris, and the drivetrain/wheel geometry made maneuvering under some furniture less effective than a commercial unit.
Despite the limitations, the experience was hugely valuable. I used a wide range of skills and tools — CAD (SolidWorks) to design the lid and cylinder, Illustrator to lay out the laser-cut base, Arduino programming and IR decoding for control, and hands-on fabrication (laser cutting, 3D printing, gluing and assembly).
The result is a finished, presentable prototype that demonstrates the idea and validates multiple design decisions quickly.
Next steps (if I continued): iterate the suction path (fan selection and ducting), strengthen wheel traction and steering control, and replace the temporary breadboard wiring with soldered connections and better power regulation. With a stronger fan and refined airflow path the device could pick up larger debris and be significantly more useful in practice.